Planetarne MicroBoty. Źródło zdjęcia: NASA Kliknij, aby powiększyć
Wywiad z Penny Boston, część I
Jeśli chcesz podróżować do odległych gwiazd lub znaleźć życie na innym świecie, to wymaga trochę planowania. Właśnie dlatego NASA założyła NIAC, NASA Institute for Advanced Concepts. Od kilku lat NASA zachęca naukowców i inżynierów do myślenia nieszablonowego, aby wymyślać pomysły tylko po tej stronie fantastyki naukowej. Mają nadzieję, że niektóre z tych pomysłów się zmienią i zapewnią agencji technologie, z których będzie mógł korzystać za 20, 30 lub 40 lat.
NIAC zapewnia finansowanie na zasadach konkurencyjnych. Finansowanych jest tylko garstka z dziesiątek złożonych wniosków. Finansowanie fazy I jest minimalne, wystarczające, aby naukowcy mogli zrealizować swój pomysł na papierze. Jeśli pomysł wykaże wartość, może uzyskać finansowanie w fazie II, umożliwiając kontynuację badań od czystej koncepcji do surowego prototypu.
Jednym z projektów, które otrzymały dofinansowanie w ramach fazy II na początku tego roku, była współpraca dr Penelope Boston i dr Stevena Dubowskiego w celu opracowania „skaczących mikrobotów” zdolnych do eksploracji niebezpiecznego terenu, w tym podziemnych jaskiń. Jeśli projekt się rozplanuje, pewnego dnia można przesłać skaczące mikroboty w poszukiwaniu życia pod powierzchnią Marsa.
Boston spędza dużo czasu w jaskiniach, badając żyjące tam mikroorganizmy. Jest dyrektorem programu badań nad jaskiniami i krasami oraz profesorem nadzwyczajnym w New Mexico Tech w Socorro w Nowym Meksyku. Dubowsky jest dyrektorem MIT Field and Space Robotics Laboratory w MIT w Cambridge, Massachusetts. Jest on częściowo znany ze swoich badań nad sztucznymi mięśniami.
Magazyn Astrobiology przeprowadził wywiad z Bostonem wkrótce po tym, jak ona i Dubowsky otrzymali stypendium Fazy II NIAC. To pierwszy z dwóch części wywiadu. Astrobiology Magazine (AM): Ty i dr Steven Dubowsky otrzymaliście ostatnio fundusze od NIAC na prace nad pomysłem użycia miniaturowych robotów do badania podziemnych jaskiń na Marsie? Jak powstał ten projekt?
Penny Boston (PB): Dużo pracy wykonaliśmy w jaskiniach na Ziemi, aby przyjrzeć się mikrobiologicznym mieszkańcom tych wyjątkowych środowisk. Uważamy, że mogą one służyć jako szablony do poszukiwania form życia na Marsie i innych ciałach pozaziemskich. W 1992 roku opublikowałem artykuł z Chrisem McKayem i Michałem Iwanowem, sugerujący, że podpowierzchnia Marsa będzie ostatnią ostoją życia na tej planecie, ponieważ z czasem geologicznym stała się zimniejsza i bardziej sucha. To sprawiło, że zajęliśmy się badaniem podpowierzchni na Ziemi. Kiedy to zrobiliśmy, odkryliśmy, że istnieje niesamowity wachlarz organizmów, które najwyraźniej są rodzime dla podpowierzchni. Oddziałują z mineralogią i wytwarzają unikalne biosignatury. Stało się więc bardzo żyznym obszarem do nauki.
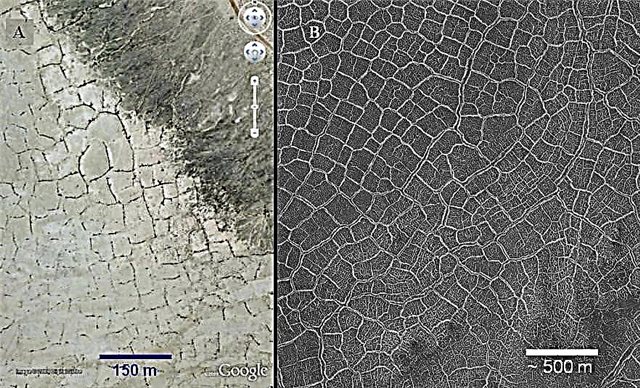
Wejście do trudnych jaskiń nawet na tej planecie nie jest takie łatwe. Przełożenie tego na roboty pozaziemskie wymaga roboty. Mamy dobre dane obrazowe z Marsa, pokazujące wyraźne dowody geomorfologiczne dla co najmniej jaskiń z rurami lawowymi. Wiemy zatem, że Mars ma co najmniej jeden rodzaj jaskini, który może być przydatnym celem naukowym dla przyszłych misji. Można przypuszczać, że istnieją również inne rodzaje jaskiń, a my mamy prasę w nadchodzącym specjalnym dokumencie Geological Society of America, specjalizującym się w unikalnych mechanizmach formowania jaskiń (speleogenetycznych) na Marsie. Najważniejszym punktem jest sposób poruszania się w tak trudnym i trudnym terenie.
AM: Czy możesz opisać to, co zrobiłeś w pierwszej fazie projektu?
PB: W fazie I chcieliśmy skoncentrować się na robotycznych jednostkach, które były małe, bardzo liczne (a więc do sprzedania), w dużej mierze autonomiczne i posiadały mobilność niezbędną do wchodzenia w trudny teren. W oparciu o ciągłą pracę dr Dubowsky'ego nad ruchem robotów aktywowanym sztucznymi mięśniami, wpadliśmy na pomysł wielu bardzo małych kuleczek o wielkości piłek tenisowych, które w zasadzie podskakują, prawie jak meksykańska fasola skacząca. Gromadzą energię mięśniową, że tak powiem, a następnie kurczą się w różnych kierunkach. Tak się poruszają.
kredyt: Renderuj przez R.D. Guus Frederick
Ustawienie planetarne do wielkoskalowych badań powierzchniowych i podpowierzchniowych planet. Kliknij obraz, aby powiększyć.
Źródło zdjęcia: Render autorstwa R.D. Guusa Fredericka
Obliczyliśmy, że prawdopodobnie moglibyśmy spakować około tysiąca tych facetów w masie ładunku wielkości jednego z obecnych MER (łazików eksploracyjnych Marsa). To dałoby nam elastyczność, by ponieść straty dużej części jednostek i nadal mieć sieć, która mogłaby wykonywać rozpoznawanie i wykrywanie, obrazowanie, a może nawet inne funkcje naukowe.
AM: W jaki sposób wszystkie te małe sfery koordynują się ze sobą?
PB: Zachowują się jak rój. Łączą się one ze sobą przy użyciu bardzo prostych zasad, ale zapewnia to dużą elastyczność w ich zbiorowym zachowaniu, co pozwala im sprostać wymaganiom nieprzewidywalnego i niebezpiecznego terenu. Ostatecznym produktem, jaki sobie wyobrażamy, jest flota tych małych ludzi wysyłanych na obiecujące miejsce lądowania, wychodzących z lądownika, a następnie udających się na jakiś podziemny lub niebezpieczny teren, gdzie rozmieszczają się jako sieć. Tworzą komórkową sieć komunikacyjną na zasadzie węzeł-węzeł.
AM: Czy są w stanie kontrolować kierunek, w którym skaczą?
PB: Mamy aspiracje, aby ostatecznie być bardzo zdolnymi. Gdy przechodzimy do fazy II, pracujemy z Fritzem Printzem w Stanford nad ultra-miniaturowymi ogniwami paliwowymi, aby zasilić tych małych facetów, co umożliwiłoby im zrobienie dość złożonej gamy rzeczy. Jedną z tych możliwości jest kontrola nad kierunkiem, w którym zmierzają. Istnieją pewne sposoby, w jakie można je zbudować, które mogą pozwolić im preferencyjnie iść w tym lub innym kierunku. To nie jest tak precyzyjne, jak by to było, gdyby były łazikami kołowymi jadącymi po prostej ścieżce. Ale mogą preferencyjnie przechylać się mniej więcej w kierunku, w którym chcą iść. Przewidujemy, że będą oni mieli co najmniej surową kontrolę nad kierunkiem. Ale wiele z ich wartości ma związek z ruchem roju jako rozszerzającej się chmury.
Choć łaziki MER są tak wspaniałe, do tego rodzaju nauki, jakiej potrzebuję, potrzebuję czegoś bardziej zbliżonego do pomysłu robota na owady zapoczątkowanego przez Rodneya Brooksa na MIT. Możliwość skorzystania z modelu inteligencji owadów i adaptacji do eksploracji od dawna mi się podobała. Dodając to do wyjątkowej mobilności zapewnianej przez pomysł skakania Dr. Dubowsky'ego, myślę, że może umożliwić rozsądnemu procentowi tych małych jednostek przetrwanie niebezpieczeństw podpowierzchniowego terenu - to wydawało mi się magiczną kombinacją.
HB: Więc w fazie I, czy któreś z nich faktycznie powstało?
PB: Nie. Faza I, z NIAC, to sześciomiesięczne badanie wymagające wysiłku i naciągania ołówka, mające na celu wykrycie najnowocześniejszych technologii. W fazie II przeprowadzimy ograniczoną liczbę prototypów i testów w terenie w ciągu dwóch lat. To o wiele mniej niż potrzeba do prawdziwej misji. Ale, oczywiście, jest to mandat NIAC do zbadania technologii za 10 do 40 lat. Myślimy, że to prawdopodobnie w przedziale od 10 do 20 lat.
AM: Jakiego rodzaju czujniki lub sprzęt naukowy wyobrażasz sobie jako zdolne do założenia tych rzeczy?
PB: Obrazowanie jest oczywiście czymś, co chcielibyśmy zrobić. Ponieważ kamery stają się niewiarygodnie małe i solidne, istnieją już jednostki w zakresie rozmiarów, które można by na nich zamontować. Być może niektóre jednostki mogą być wyposażone w funkcję powiększania, więc można spojrzeć na tekstury materiałów, na które lądują. Integracja zdjęć wykonanych małymi kamerami na wielu różnych małych urządzeniach jest jednym z obszarów przyszłego rozwoju. To wykracza poza zakres tego projektu, ale właśnie o tym myślimy w przypadku obrazowania. A potem z pewnością czujniki chemiczne, które są w stanie wąchać i wyczuwać środowisko chemiczne, co jest bardzo ważne. Wszystko, od maleńkich nosków laserowych po elektrody jonoselektywne do gazów.
Przewidujemy, że nie wszystkie będą identyczne, ale raczej zespół, z wystarczającą liczbą różnych rodzajów jednostek wyposażonych w różnego rodzaju czujniki, aby prawdopodobieństwo nadal było wysokie, nawet biorąc pod uwagę dość wysokie straty liczby jednostek, że my nadal miałby pełny zestaw czujników. Mimo że każda pojedyncza jednostka nie może mieć na sobie gigantycznego ładunku czujników, możesz mieć jej wystarczająco dużo, aby w znacznym stopniu pokryć się z innymi jednostkami.
AM: Czy będzie możliwe przeprowadzenie testów biologicznych?
PB: Myślę, że tak. Zwłaszcza jeśli wyobrażasz sobie ramy czasowe, na które patrzymy, wraz z postępami, które pojawiają się w Internecie ze wszystkim, od kropek kwantowych po urządzenia typu lab-on-chip. Oczywiście trudność polega na dostarczeniu do nich materiału próbnego. Ale gdy mamy do czynienia z małymi urządzeniami stykającymi się z ziemią, takimi jak nasze skaczące mikroboty, możesz ustawić je bezpośrednio nad materiałem, który chcą przetestować. W połączeniu z mikroskopią i obrazami o szerszym polu, myślę, że istnieje możliwość wykonania poważnej pracy biologicznej.
AM: Czy wiesz, jakie kamienie milowe chcesz osiągnąć w trakcie dwuletniego projektu?
PB: Przewidujemy, że do marca możemy mieć prymitywne prototypy o odpowiedniej mobilności. Ale może to być zbyt ambitne. Kiedy będziemy już mieć jednostki mobilne, naszym planem jest przeprowadzenie testów w terenie w prawdziwych jaskiniach z lawą, nad którymi pracujemy w Nowym Meksyku.
Witryna terenowa jest już przetestowana. W ramach fazy I wyszła grupa MIT i nauczyłem ich trochę o jaskiniach i tym, jaki był teren. To był dla nich duży przebój. Jedną rzeczą jest projektowanie robotów do sal MIT, ale kolejną rzeczą jest zaprojektowanie ich do rzeczywistych skalistych środowisk. To było bardzo edukacyjne doświadczenie dla nas wszystkich. Myślę, że mają całkiem niezły pomysł na warunki, jakie muszą spełnić przy projektowaniu.
AM: Jakie są te warunki?
PB: Niezwykle nierówny teren, wiele szczelin, w których ci faceci mogliby się tymczasowo zablokować. Potrzebujemy więc trybów pracy, które pozwolą im się wydostać, przynajmniej z rozsądną szansą na sukces. Wyzwania związane z komunikacją w polu widzenia na bardzo nierównej powierzchni. Pokonywanie dużych głazów. Utknąłem w małych pęknięciach. Tego rodzaju rzeczy.
Lawa nie jest gładka. Wnętrze rur lawowych jest samoistnie gładkie po ich uformowaniu, ale jest dużo materiału, który kurczy się, pęka i spada. Są więc stosy gruzu, które można ominąć i wiele zmian wysokości. I to są rzeczy, których konwencjonalne roboty nie mają możliwości.
Oryginalne źródło: NASA Astrobiology