Astronauci, uruchomcie silniki łazika. Dwóch astronautów niedawno zdalnie sterowało łazikiem w Kalifornii z ich stanowiska na Międzynarodowej Stacji Kosmicznej - około 250 mil nad głową.
Koncepcja sama w sobie jest fajna, ale NASA ma bardziej ambitne cele. Myślą o tych misjach księżycowych, asteroidowych i marsjańskich, które agencja naprawdę chciałaby przeprowadzić pewnego dnia, jeśli otrzyma pieniądze i zezwolenie.
Załóżmy, że potencjalnie załoga Marsa mogłaby użyć łazików do zbadania jak największej powierzchni w ograniczonym czasie.
Mars Curiosity i jego poprzedni łaziki odkryli niesamowite rzeczy na Marsie, ale wyzwaniem jest średnie 20-minutowe opóźnienie w komunikacji między Marsem a Ziemią. NASA zręcznie rozwiązuje ten problem za pomocą technik takich jak oprogramowanie do unikania zagrożeń, aby, powiedzmy, Curiosity nie wpadł na wielki głaz na Marsie. (Więcej technik z NASA pod tym linkiem.) Ale posiadanie astronautów nad powierzchnią skróciłoby opóźnienie czasowe i potencjalnie zmieniłoby łazik marsjański na zawsze.

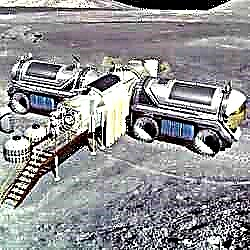
A więc o tym teście: jak dotąd dwóch astronautów kierowało prototypem pojazdu planetarnego K10 wokół „Roverscape” w Ames Research Center w Kalifornii. NASA nazywa to „pierwszą w pełni interaktywną zdalną operacją łazika planetarnego przez astronautę w kosmosie”.
Chris Cassidy z Expedition 36 pojawił się po raz pierwszy 15 czerwca, spędzając trzy godziny poruszając maszyną po porozrzucanym po skale terenie o wielkości dwóch boisk piłkarskich. Następnie jego kolega z załogi, Luca Parmitano, skręcił 26 lipca, posuwając się tak daleko, aby rozmieścić symulowaną antenę radiową. Kolejna sesja testowa powinna odbyć się w sierpniu.
„Podczas gdy w eksploracji podmorskiej powszechną praktyką jest używanie joysticka i bezpośrednia kontrola zdalnych okrętów podwodnych, roboty K10 są bardziej inteligentne”, powiedział Terry Fong, kierownik projektu telerobotyki eksploracji ludzi w Ames.
„Astronauci wchodzą w interakcję z robotami na wyższym poziomie, mówiąc im, gdzie mają się udać, a następnie sam robot samodzielnie i inteligentnie wymyśla, jak bezpiecznie się tam dostać”, dodał Fong, który jest również dyrektorem grupy inteligentnej robotyki Amesa.
Testy symulowały misję do księżycowego punktu L2 Lagrangian, miejsca, w którym połączona grawitacja Księżyca i Ziemi pozwala statkowi kosmicznemu pozostać praktycznie stabilnym nad powierzchnią. NASA powiedziała, że jedną z możliwości takiej misji byłoby rozmieszczenie teleskopu radiowego po stronie Księżyca po przeciwnej stronie Ziemi, z dala od szumu radiowego Ziemi.
Te testy pokazują również kilka technicznych nowości:
- NASA testuje system przesyłania danych robota RAPID (Robot Application Programming Interface Delegate) w celu sterowania robotem z kosmosu, zasadniczo pracując nad rozebraniem informacji do niezbędnego minimum, aby komunikacja była jak najłatwiejsza. (RAPID był wcześniej testowany, ale nigdy w ten sposób.)
- Agencja po raz pierwszy używa swojego oprogramowania Ensemble w kosmosie do telerobotyki. Opisuje to jako „otwartą architekturę do opracowywania, integracji i wdrażania oprogramowania do obsługi misji”.
Źródło: NASA