Źródło zdjęcia: ESA
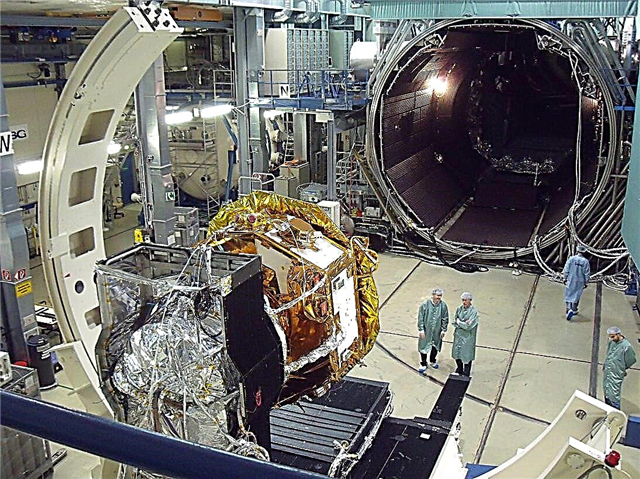
Statek kosmiczny SMART-1 Europejskiej Agencji Kosmicznej osiągnął 50. orbitę Ziemi; działający silnik jonowy przez ponad 560 godzin. Kontrolery ESA przeprowadziły serię testów na statku kosmicznym i prawie wszystko wydaje się działać idealnie - istnieje niewielki problem z jego śledzeniem gwiazd. Oczekuje się, że statek kosmiczny dotrze na Księżyc do marca 2005 r., Kiedy rozpocznie mapowanie minerałów powierzchniowych i lodu.
Sonda osiąga teraz 50. orbitę i wykonała ponad 560 godzin w kosmosie. Głównym działaniem ostatniego tygodnia było wielokrotne używanie elektrycznego silnika napędowego do stopniowej zmiany orbity statku kosmicznego. Jest to ograniczone do około 15 godzin dziennie w zależności od tego, czy statek kosmiczny znajduje się w zaćmieniu. Do tej pory silnik generował ciąg przez łączny czas około 240 godzin.
Wydajność elektrycznego silnika napędowego była okresowo monitorowana za pomocą danych telemetrycznych przesyłanych przez statek kosmiczny i drogą radiową na stacjach naziemnych. Wydajność EP ciągle się poprawia, zgodnie z oczekiwaniami, w fazie wypychania. Podczas pierwszego wypalania mierzyliśmy niesprawność około 3%, zgodnie z oczekiwaniami we wczesnej eksploatacji silnika podczas pierwszego użycia. Dziś mamy niewielką nadwyżkę wydajności wynoszącą około 0,5%, co daje nam pewność doskonałych warunków elektrycznego układu napędowego.
Energia elektryczna dostarczana przez panele słoneczne jest nominalna. Oczekiwana degradacja spowodowana środowiskiem promieniowania jest mniej dotkliwa niż najgorszy scenariusz. Możemy zatem założyć, że będziemy w stanie pchnąć z pełną mocą przez dość długi czas.
Podsystem termiczny działa bardzo dobrze: wszystkie temperatury są zgodne z oczekiwaniami, a zużycie energii przez grzejnik jest niższe niż szacowane. Jest to wygodna sytuacja i daje nam pewność, że system będzie w stanie dobrze poradzić sobie z długimi sezonami zaćmień wiosną przyszłego roku.
Do tej pory podsystemy komunikacji, obsługi danych i oprogramowania pokładowego działały nominalnie. Podsystem kontroli położenia ogólnie działał bardzo dobrze, a wydajność kontrolera podczas fazy pchania była tak płynna i dokładna, że nie było potrzeby używania silników hydrazynowych do desaturacji małych kół reakcyjnych używanych jako główne siłowniki.
Głównym przedmiotem zainteresowania jest działanie funkcji śledzenia gwiazd. Ten zaawansowany autonomiczny maper gwiazd ostatnio nie zapewnił dobrych informacji o nastawieniu w kilku przypadkach dotyczących perygeum i okresów zaćmienia. Chociaż system kontroli położenia może poradzić sobie z tymi sporadycznymi problemami, te planowane operacje statku kosmicznego są zakłócane. Zespół operacyjny w ESOC jest zobowiązany do zmiany harmonogramu operacji w celu uwzględnienia tych zdarzeń. W międzyczasie zespół projektu ESTEC i zespoły branżowe są zajęte próbą wyjaśnienia tych anomalii. Pomimo tej niedogodności utrzymywane są okresy pchania. Więcej na ten temat zostanie podanych w przyszłych raportach.
Informacje o orbicie / trajektorii
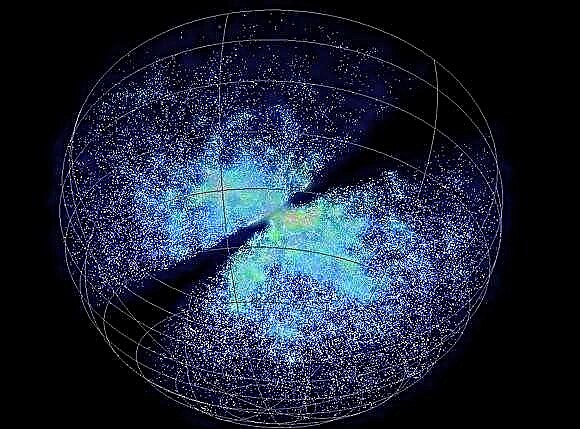
Orbita SMART-1 jest ciągle modyfikowana pod wpływem niskiego ciągu elektrycznego napędu. Oscylujące elementy orbitalne są okresowo obliczane przez specjalistów ESOC. Elementy te definiują tak zwaną „orbitę orbitującą”, którą podróżowałby statek kosmiczny, gdyby w tym momencie wszystkie perturbacje, w tym ciąg EP, przestałyby istnieć. Jest to więc obraz sytuacji w tym momencie. W rzeczywistości ścieżka przemieszczana przez statek kosmiczny jest ciągłą spiralą prowadzącą z jednej orbity na drugą.
Na tym schemacie przedstawiono GTO, orbitujące orbity podczas startu i w różnych momentach. Duża orbita, oznaczona jako „ostateczna”, jest tą, którą spodziewamy się osiągnąć pod koniec ucieczki pasa radiacyjnego za około dwa miesiące.
Od samego początku układowi napędowemu udało się zwiększyć pół-główną oś orbity o 1555 km, zwiększając wysokość perygeum z pierwotnego 656 km do 2035 km i okresu orbity o ponad godzinę, od początkowych 10 godziny 41 minut do obecnych 11 godzin 42 minut.
Oryginalne źródło: ESA News Release