ESA spędziła kilka ostatnich lat pracując nad stworzeniem międzynarodowej bazy księżycowej, która będzie służyć jako duchowy następca Międzynarodowej Stacji Kosmicznej (ISS). Aby to osiągnąć, poprosili o pomoc inne agencje kosmiczne i wykonawców w celu opracowania koncepcji siedlisk kosmicznych i metod budowy, a także sposobów zapewnienia wsparcia robotycznego i logistycznego.
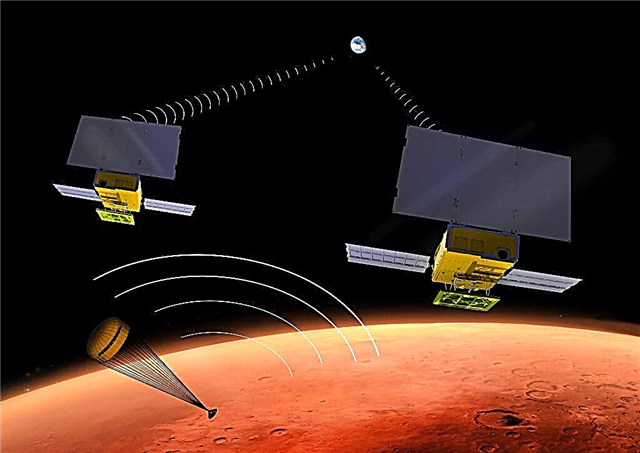
Niedawno ESA Technology Development Element (TDE) podpisał umowę z francuskim deweloperem technologii COMEX, aby stworzyć system robotyczny TRAILER. Ten dwuletni projekt przetestuje nową architekturę misji, w której dwa łaziki pracują w tandemie (i przy pomocy astronautów) w celu zbadania powierzchni Księżyca i zbudowania stałej placówki na Księżycu.
System TRAILER wykorzysta szereg najnowszych osiągnięć w dziedzinie robotyki, zdalnego sterowania i oprogramowania autonomicznego. Roboty tandemowe są zaprojektowane do działania z Ziemi lub z bazy na księżycowej orbicie - tj. Lunar Gateway. Będą jednak musieli również działać autonomicznie przez długi czas i wykonywać zadania bez nadzoru astronautów.

Ostatecznie TRAILER został zaprojektowany do testowania robotycznych systemów eksploratorów, które składają się z dwóch elementów, znanych jako CIĄGNIK i WAIN. Pierwszy wymaga zwinnego elementu łazika, który będzie w stanie wypłynąć na powierzchnię na krótki czas, uzyskać próbki do analizy i komunikować się przez lokalny bezprzewodowy nadajnik-odbiornik.
Tymczasem element WAIN będzie składał się z aktywnej przyczepy, która zapewni bazę dla łazika i będzie ograniczona pod względem mobilności i nawigacji. Obejmie to lokalną sieć bezprzewodową ułatwiającą komunikację z powierzchni Księżyca na Ziemię (lub orbitę), zapewniającą zasilanie łazika i samego siebie oraz pomoc w operacjach naukowych w laboratorium na pokładzie.
Chociaż robotami tymi można było sterować z całej Ziemi, architektura misji została zaprojektowana z myślą o Bramie Księżycowej. To siedlisko - które jest opracowywane przez NASA, ESA i konsorcjum partnerów międzynarodowych - będzie pierwszą ludzką placówką poza orbitą Ziemi i będzie służyć jako obóz podstawowy dla operacji na powierzchni Księżyca.
Należą do nich powrót NASA na Księżyc (Project Artemis) oraz proponowana przez ESA architektura robotyczna ulepszona przez człowieka oraz zdolność lądownika i łazika do badań i badań Księżyca (HERACLES). I oczywiście istnieją długoterminowe plany ESA, we współpracy z innymi agencjami kosmicznymi i partnerami międzynarodowymi, dotyczące stworzenia długo oczekiwanej Międzynarodowej Wioski Księżycowej.
We wszystkich przypadkach sukces sprowadza się do współpracy; nie tylko między agencjami oraz między podmiotami publicznymi i prywatnymi, ale także między astronautami i robotami-odkrywcami. Kiedy TRAINER będzie gotowy, dołączy do szeregu robotycznych misji w dorzeczu Bieguna Południowego-Aitken, które będą poszukiwać zasobów, które mogą być wykorzystane do wspierania operacji ludzkich - inaczej. Wykorzystanie zasobów na miejscu (ISRU).
ESA jest obecnie zaangażowana w rozwój nowego typu infrastruktury dowodzenia i systemu kontroli sprzężenia zwrotnego siły, który pozwoli astronautom „poczuć” to, co czuje łazik. W ramach eksperymentów Analog-1 astronauta ESA Luca Parmitano z powodzeniem wykazał zdolność systemu do sterowania łazikiem na Ziemi z ISS.
Rozwój TRAILER będzie prowadzony przez COMEX przy wsparciu Niemieckiego Centrum Badań Sztucznej Inteligencji Centrum Innowacji Robotyki (DFKI RIC) i wiedeńskiej firmy robotycznej LIQUIFER Systems Group.